
La vaca cega desconfiada
_FRASE_TOP
Un remontoir intermedi o remontoir d'egalitĂ© (en francès significa accionament intermedi o mecanisme de tensiĂ³) Ă©s un dispositiu d'emmagatzematge d'energia dels rellotges mecĂ nics que no acciona tota la tracciĂ³, sinĂ³ nomĂ©s la roda d'escapament o una roda immediatament davant d'ella (segona roda en rellotges portĂ tils) i es carrega periĂ²dicament (enrotlla) per la font d'energia principal. L'escapament i, per tant, el sistema d'oscil·laciĂ³ (pèndol, molla d'equilibri) estan proveĂ¯ts d'un parell motriu en gran part constant, que forma el requisit previ per al perĂode d'oscil·laciĂ³ constant que determina la precisiĂ³.
Remontoir: del francès, remontoir d'egalitĂ©, artefacte utilitzat per proporcionar força constant a l'escapament. Normalment, l'energia de la molla principal disminueix gradualment a mesura que la corda s'esgota, afectant negativament la precisiĂ³. El remontoir sol prendre la forma d'una molla en espiral unida a una de les rodes del tren principal, que periĂ²dicament li dona corda la font principal; Mentre hi hagi prou energia de la font principal, la font Remontoir proporcionarĂ una energia gairebĂ© invariable a l'escapament. Els ressorts Remontoir es poden rebobinar amb tanta freqĂ¼Ă¨ncia com una vegada per segon, o amb tan poca freqĂ¼Ă¨ncia com cada cinc minuts o fins i tot mĂ©s. El remontoir de ressort va ser inventat per John Harrison per als seus cronĂ²metres marins; l'antic remontoir de gravetat, utilitzat en rellotges de pèndol, va ser inventat pel rellotger, astrĂ²nom i matemĂ tic d'origen suĂs Jost BĂ¼rgi, a finals del segle XVI.
Els dissenys en què l'emmagatzematge d'energia intermèdia Ă©s part de l'escapament i es carrega per oscil·laciĂ³ o mitja oscil·laciĂ³ de l'oscil·lador o emet un impuls motriu no es coneixen com a Remontoirs intermedis, sinĂ³ que s'atribueixen als escapaments. Alguns exemples sĂ³n les escapades gravitacionals o de força de molla de Denison, Riefler i Strasser, aixĂ com l'escapament constant de l'impuls de DĂ©hon (vegeu escapament (rellotge)). Fins i tot els rellotges automĂ tics moderns no sĂ³n rellotges amb Remontoir intermedi, perquè no tenen un emmagatzematge d'energia intermedi, sinĂ³ que la molla principal (font d'energia principal) es retensa irregularment (segons el moviment del rellotge). AquĂ no es consideren rellotges construĂ¯ts en temps mĂ©s recents amb Remontoir elèctric intermedi.
Els rellotges de butxaca antics sovint porten la inscripciĂ³ remontoir. Per regla general, aquests rellotges no tenen un Remontoir intermedi. Era costum designar rellotges de Remontoir de corona d'aquesta manera, en contraposiciĂ³ als bobinats de claus utilitzats anteriorment. Les unitats auxiliars, que mantenen el seu moviment durant l'enrotllament del rellotge (en el cas dels rellotges de torre, aixĂ² sovint triga hores), tambĂ© s'anomenen remontoir. No obstant aixĂ², aquests condueixen tot el tren d'aterratge i no nomĂ©s l'escapament i, per tant, cal distingir-los dels Remontoirs intermedis. [1]
La principal font d'energia d'un rellotge proporciona un gran parell motriu durant un llarg perĂode de temps (dies, setmanes), mentre que el bobinat intermedi emet un petit parell necessari per al funcionament de l'escapament i el sistema oscil·lant, amb la necessitat de recĂ rrega periĂ²dica a intervals de temps curts a causa de la petita capacitat d'emmagatzematge.
 Parells en Remontoir intermedi
Parells en Remontoir intermedi
Els rellotges grans (rellotges de torre, rellotges de pis, rellotges de taula, etc.) solen ser accionats per un pes, i els petits rellotges (rellotges de butxaca, rellotges de polsera, despertadors, etc.) sĂ³n accionats per una molla principal (molla de fulles en espiral). El desavantatge de la unitat principal Ă©s que a mesura que la molla es relaxa, es lliura un parell decreixent. En principi, la unitat de pes ofereix un parell constant. No obstant aixĂ², les imprecisions en la transmissiĂ³ de potència a travĂ©s de la unitat d'escapament, aixĂ com altres influències (brutĂcia, condicions meteorolĂ²giques en el cas dels rellotges de torre, etc.) tambĂ© condueixen a un parell de tracciĂ³ variable en l'escapament. L'Remontoir intermedi elimina aquestes pertorbacions i proporciona un parell motor en gran mesura constant sempre que el parell variable de la unitat principal encara sigui capaç de carregar el buffer (punt S, vegeu la figura). Els parells emesos per la font d'energia principal sĂ³n molt mĂ©s grans que els que es mostren a la imatge a causa de la relaciĂ³ de velocitat en relaciĂ³ amb els parells en l'escapament.
La invenciĂ³ de l'Remontoir intermedi s'atribueix a Jost BĂ¼rgi (principis del segle 17). Com a resultat, s'han conegut moltes construccions diferents. A mĂ©s del dispositiu d'emmagatzematge d'energia (pes o molla), tots tenen en comĂº un mecanisme d'alliberament i parada. Com es descriu a continuaciĂ³, el desencadenant representa un mal funcionament inevitable que s'ha de mantenir el mĂnim possible mitjançant mesures constructives. El funcionament del tren d'aterratge no tĂ© lloc en els passos de temps especificats per la roda d'escapament, com Ă©s el cas dels rellotges sense Remontoir intermedi, sinĂ³ que ve determinat pel perĂode de Remontoir del bobinat intermedi. Per exemple, si s'enrotlla un cop per minut, la unitat nomĂ©s es mourĂ un pas mĂ©s un cop per minut. Per tant, el transcurs de temps nomĂ©s es pot mostrar en increments de minuts, tret que s'uneixi un punter a l'eix de la roda d'escapament o es derivi una unitat de visualitzaciĂ³ (secundĂ ria).
Per als rellotges portables, no ha prevalgut el Remontoir intermedi, encara que tambĂ© s'ha utilitzat esporĂ dicament en els Ăºltims temps. Hi ha moltes raons per a aixĂ². En particular, la mecĂ nica de la sustentaciĂ³ intermèdia Ă©s una font addicional d'error (per exemple, fatiga de molla de l'emmagatzematge intermedi, problemes de fricciĂ³ del mecanisme d'alliberament, etc.), de manera que el major esforç no va conduir a una millora significativa de la precisiĂ³. MĂ©s sovint, el bobinat intermedi es troba en rellotges grans (especialment rellotges de torre).
A continuaciĂ³ s'expliquen els principis d'algunes construccions.
 Remontoir intermedi de Harrison
Remontoir intermedi de Harrison
John Harrison va utilitzar un bobinat intermedi per al seu cronĂ²metre marĂ H2 segons la imatge adjacent.
Els eixos 1 a 4 estan muntats en un marc que no es mostra. D'una banda, el saltamartĂ d'escapament GH, que aquĂ no interessa, permet que la roda d'escapament HR funcioni pas a pas en el temps amb el sistema d'oscil·laciĂ³, que tampoc es mostra (feixos d'equilibri de batuda creuada acoblats per molla de tensiĂ³ acoblada en el cas de Harrison) i, d'altra banda, subministra al sistema d'oscil·laciĂ³ impulsos d'accionament periĂ²dics per mantenir l'oscil·laciĂ³. La roda d'escapament i dos discos de lleva KS s'asseuen fermament a l'eix 1. Dos ressorts de tensiĂ³ F estan units a les plaques de lleva, que estan connectades a una roda de tensiĂ³ SR en el seu altre extrem mitjançant pins ST. La roda de tensiĂ³, un pinyĂ³ RZ1 i una estrella de desplaçament SS estan connectats a l'eix buit HW, que pot girar sobre l'eix 1. Els ressorts de tensiĂ³ exerceixen un parell motor a la roda d'escapament en sentit contrari al sentit de les agulles del rellotge. Mentre que la roda d'escapament i, per tant, tambĂ© les lleves es mouen contĂnuament, el moviment de la roda de subjecciĂ³ queda bloquejat per una peça de bloqueig SP unida a la doble palanca DH, de manera que la doble palanca estĂ constantment en contacte amb l'estrella de desplaçament a causa del pes G. D'aquesta manera, la tensiĂ³ es relaxa i lliura una força cada vegada mĂ©s baixa. No obstant aixĂ², atès que les longituds de molla d'escurçament f (f1, f2) es compensen ampliant els braços de palanca a (a1, a2), el parell motriu roman en gran mesura constant. La retensiĂ³ de les molles es produeix periĂ²dicament desprĂ©s que la roda d'escapament hagi girat amb un cert angle, Ă©s a dir, desprĂ©s d'un cert temps (en el cas de Harrison sĂ³n 30 segons). Aquest procĂ©s s'activa mitjançant una de les lleves N disposades a la roda d'escapament, que actua sobre el botĂ³ SF de la doble palanca i aixeca aixĂ la peça de bloqueig de l'estrella de canvi. En aquest cas, l'anomenat treball d'alliberament l'ha de realitzar la roda d'escapament contra el pes de la palanca i contra les forces de fricciĂ³. AixĂ² redueix el parell motriu subministrat per les molles de tensiĂ³, de manera que es subministra un impuls d'accionament inferior al sistema oscil·lant durant el procĂ©s d'activaciĂ³. Mitjançant l'optimitzaciĂ³ constructiva del mecanisme d'alliberament (o mecanisme d'aturada), el treball d'alliberament s'ha de minimitzar per tal de mantenir la influència (negativa) en la precisiĂ³ el mĂ©s baixa possible. Com que la peça de bloqueig ja no bloqueja l'estrella de canvi, el parell motriu subministrat per la font d'energia principal es transmet des de la roda motriu anteriorment estacionĂ ria LW al pinyĂ³ i, per tant, a la roda de subjecciĂ³, que ara es mou en sentit antihorari i retensa els ressorts. Per assegurar que aquest moviment no es produeix massa rĂ pid, s'acciona un vestĂbul W amb el pinyĂ³ RZ2. DesprĂ©s que la lleva de la roda d'escapament hagi deixat el botĂ³ de la doble palanca, la peça de bloqueig de la doble palanca torna a enganxar-se a l'estrella de canvi i finalitza la retensiĂ³. La unitat torna a estar aturada. La conducciĂ³ de la roda d'escapament per les molles no es va interrompre durant tot el procĂ©s de retensiĂ³.
Una altra soluciĂ³ utilitzada per a rellotges grans provĂ© de Bernard-Henri Wagner. El principi es mostra a la imatge adjacent.
 remontoir intermedi de Wagner
remontoir intermedi de Wagner
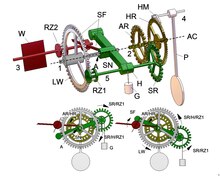
Els eixos 1 a 4 es munten al marc que no es mostren. Els eixos 1 i 2 es troben a l'eix comĂº AC. Una roda d'elevaciĂ³ SR i un pinyĂ³ RZ5 estan muntats a l'eix 1, amb l'eix muntat en una palanca equilibrada H, que pot girar lliurement al voltant de l'eix 1. La roda ascendent acciona una roda motriu AR, que, igual que la roda d'escapament HR, se situa fermament a l'eix 2. La roda d'escapament Ă©s alliberada periĂ²dicament i aturada per l'escapament HM segons el perĂode d'oscil·laciĂ³ del pèndol. L'engranatge LW, impulsat per la font d'alimentaciĂ³ principal a travĂ©s del tren d'aterratge, exerceix constantment un parell motor sobre el pinyĂ³ RZ2, que, com dos dits de desplaçament SF i un W, estĂ fermament connectat a l'eix 3. Sota la influència del parell, un dit de desplaçament es recolza sobre la part cilĂndrica d'una lleva de canvi SN connectada a la palanca i, per tant, impedeix que la roda LW o el tren d'aterratge es moguin. La lleva de canvi tĂ© un recĂ©s A, que allibera el respectiu dit de canvi quan la palanca es torça una certa quantitat, cosa que permet moure la unitat. El pes G s'uneix a la palanca. El pes aixecat per la palanca representa l'emmagatzematge d'energia intermèdia i exerceix un parell motor al voltant de l'eix de CA.
La palanca elevada es pot moure cap avall sota la influència d'aquest parell nomĂ©s si l'escapament allibera la roda d'escapament i, per tant, la roda motriu. Quan s'atura la roda d'escapament, es bloqueja el moviment de la palanca, perquè la roda d'escalada i el pinyĂ³ RZ1 nomĂ©s es poden moure en quantitats angulars iguals a causa de la connexiĂ³ fixa amb l'eix 5. No obstant aixĂ², en rodar sobre les seves contrarodes sostingudes per aquesta quantitat angular, la palanca hauria de moure's al voltant de l'eix de CA en diferents angles a causa dels diferents diĂ metres de SR i RZ1, cosa que no Ă©s possible.
Si el SR i el RZ1 tinguessin la mateixa mida (i per tant també el LW i l'AR fossin de la mateixa mida), la palanca es mouria cap avall sense obstacles fent rodar les rodes, fins i tot quan la roda d'escapament estigués subjecta.
Si s'allibera la roda d'escapament, el moviment de rodament de SR a AR no es converteix completament en un moviment angular de la palanca, ja que part del moviment es transfereix a AR. Aquest moviment diferencial compensador permet el moviment de la palanca, ja que els mateixos moviments angulars de RZ1 i SR ara no entren en conflicte amb les condicions de moviment mĂºtuament excloents de la palanca.
El pes genera un parell permanent (petit), que proporciona un impuls motriu prou gran per a l'escapament o pèndol. A la roda ascendent, aquest parell actua en el sentit de les agulles del rellotge, de manera que s'aplica un moment a la roda motriu i, per tant, a la roda d'escapament sense interrupciĂ³ en sentit contrari al sentit de les agulles del rellotge. Cada vegada que s'allibera la roda d'escapament, es mou per la quantitat especificada per l'escapament i la palanca descendeix gradualment amb l'energia lliurada a la roda d'escapament o pèndol amb les rodes SR i RZ1 girant en el procĂ©s. En la posiciĂ³ de l'extrem inferior, la lleva de canvi allibera l'ala de canvi. LW es mou en sentit antihorari i, atès que SR estĂ bloquejat intermitentment per AR (o HR), aixeca la palanca en un moviment rĂ pid. SR roda en sentit antihorari a AR, de manera que nomĂ©s el moment determinat per G continua actuant sobre AR mitjançant SR. Per tant, la roda d'escapament tambĂ© es condueix uniformement durant aquest procĂ©s i l'impuls motriu del pèndol es mantĂ© constant. El moviment rĂ pid de la palanca o LW Ă©s esmorteĂ¯t pel vestĂbul. DesprĂ©s que RZ2 hagi completat mitja volta, l'altra ala de canvi colpeja la lleva de canvi, que deixa de bobinar. Una animaciĂ³ i vĂdeos estan disponibles a . [2][3]
Com que la distĂ ncia horitzontal a l'eix 1 (braç de palanca) canvia quan es mou la palanca, el parell lliurat a la roda d'escapament no Ă©s constant. Igual que amb Harrison, aixĂ² es podria solucionar guiant la corda sobre la qual penja el pes sobre una lleva unida a la palanca.
El Remontoir intermedi, inventat per Robert Robin, es basa en el remontoir atribuĂ¯t a Christiaan Huygens, Ă©s a dir, com s'ha esmentat anteriorment, un dispositiu per mantenir el parell motriu durant l'enrotllament del rellotge. La funciĂ³ d'aquesta unitat auxiliar es pot veure a la imatge adjacent. [4]
 Accionament auxiliar de Huygens
Accionament auxiliar de Huygens
Amb un mitjĂ de tracciĂ³ infinit (normalment una cadena), dos rodets solts LR estan connectats a una roda LW que impulsa el moviment del rellotge i una roda bobinadora AZ. Els rodets i les rodes solen estar dissenyats com a engranatges. Dos pesos de diferents mides, G1 i G2, pengen de les rodes soltes. Com es mostra, diferents forces actuen sobre la roda LW a travĂ©s del dispositiu de tracciĂ³, de manera que un parell motriu en el sentit de les agulles del rellotge
M = 0.5(G1-G2)r
entra en vigor. A mesura que el rellotge caduca, G1 s'enfonsa cap avall i G2 es mou cap amunt. Per enrotllar el rellotge, la roda de Remontoir es gira en sentit antihorari, elevant G1 i baixant G2. El parell motriu que actua sobre la roda LW no es veu afectat durant aquest procĂ©s (a part de les forces d'acceleraciĂ³), de manera que es garanteix una conducciĂ³ constant del rellotge.
 remontoir intermedi de Robin
remontoir intermedi de Robin
Sobre aquesta base, Robin ha dissenyat un Remontoir intermedi (veure imatge adjacent). No Ă©s el tren d'aterratge el que es condueix, sinĂ³ la roda motriu AR davant de la roda d'escapament HR que es condueix amb un parell constant. Els pesos sĂ³n molt mĂ©s petits que amb Huygens, ja que la unitat nomĂ©s ha de mantenir l'oscil·laciĂ³ del pèndol P amb l'ajuda del HM d'escapament i no ha de conduir tota la unitat. L'Remontoir intermedi Ă©s enrotllat periĂ²dicament pel tren d'aterratge, que Ă©s impulsat per la font principal d'accionament (gran pes o molla principal). El tren d'aterratge transmet el seu parell motor a travĂ©s de la roda LW a la roda intermèdia ZR, que eleva G1 o baixa G2. Una mecĂ nica simple significa que el bobinat nomĂ©s tĂ© lloc quan G1 ha arribat al seu punt mĂ©s baix. A continuaciĂ³, G1 es recolza sobre la peça de pressiĂ³ DS. Un enllaç format per la palanca H1 i la palanca d'engranatges SH, aixĂ com la peça de connexiĂ³ H2 connectada a elles, que es munta al bastidor no mostrat a A i B, es desvia aixĂ de la seva posiciĂ³ de repĂ²s (treball d'alliberament). La palanca d'engranatges gira al voltant de B i la seva parada allibera el passador de canvi ST unit a la roda LW. LW gira en sentit antihorari i enrotlla l'Remontoir intermedi a travĂ©s de ZR. Durant aquest procĂ©s, el pes HG garanteix que l'enllaç torni a la seva posiciĂ³ de repĂ²s, que es caracteritza pel contacte de la palanca d'engranatges amb la parada AS. Per tant, la roda LW s'atura de nou desprĂ©s d'una revoluciĂ³, ja que ST colpeja la parada de la palanca d'engranatges. Per tant, la unitat caducarĂ gradualment amb les conseqĂ¼Ă¨ncies per a la visualitzaciĂ³ del temps ja esmentada anteriorment. Per descomptat, la font principal de transmissiĂ³ tambĂ© s'ha d'enrotllar a distĂ ncies mĂ©s grans. En aquest cas, es pot utilitzar un segon sistema Huygens (amb grans pesos) per mantenir la velocitat del rellotge.
Una realitzaciĂ³ de l'Remontoir intermedi segons la imatge nomĂ©s Ă©s convenient per a cops de pes petits, ja que el parell motriu no Ă©s constant quan els pesos es mouen a causa del canvi de direcciĂ³ de les forces de la corda (diagrama de forces). Per aquest motiu, els diĂ metres de les politges i l'espaiat de les rodes sovint es trien a la prĂ ctica de manera que els fils de corda o cadena corren paral·lels i, per tant, el parell motriu es mantĂ© constant.
A mitjans del segle 19, Ferdinand Adolph Lange va desenvolupar un sistema de Remontoir intermedi adequat per a rellotges de butxaca, que es va utilitzar en els rellotges de la seva empresa. El principi es pot veure a la imatge adjacent. [5]
 Remontoir intermedi DE Lange
Remontoir intermedi DE Lange
Els eixos 1 a 4 es munten al marc que no es mostra. Una roda de salt SR equipada amb sis dents (topalls) s'asseu fermament a l'eix1, igual que un corrĂ³ espiral SPR. Una molla motriu AS (molla espiral; no s'ha de confondre amb l'espiral de la roda d'equilibri U), que representa l'emmagatzematge intermedi d'energia, estĂ unida al corrĂ³ espiral amb el seu extrem interior. A l'eix 1, la roda d'escapament HR i la roda disparadora ALR, que estan fermament connectades entre si, poden girar lliurement com un eix buit. Igual que la roda de salt, la roda disparadora tĂ© sis dents. Un bloc espiral SK estĂ unit a la roda d'escapament, a la qual s'uneix l'extrem exterior de la molla principal. La molla principal es precarrega entre la roda d'escapament i la roda de salt (girant les rodes una contra l'altra) de tal manera que el parell que es genera per ella quan la roda de salt estĂ estacionĂ ria Ă©s suficient per conduir l'escapament (l'armadura) i aixĂ donar a la roda d'equilibri un impuls motriu. El parell proporcionat per la font d'energia principal (molla principal), que es transmet DE la roda motriu que no es mostra a la roda motriu, actua constantment sobre el volant de salt a travĂ©s de la roda motriu AR connectada permanentment a ella. S'impedeix que la roda saltadora es torci per la part inferior del braç UHA d'una doble palanca, sobre la PEÇA en repĂ²s de la qual descansa una dent de la roda de salt. L'OHA del braç superior de la doble palanca es pressiona constantment lleugerament contra la roda del gallet mitjançant una molla BF (molla fulla). La roda d'escapament, impulsada per la molla principal i inhibida periĂ²dicament per l'armadura A, s'escapa gradualment. En el procĂ©s, la força motriu es relaxa. La roda disparadora gira sincrĂ²nicament amb la roda d'escapament i eleva el braç superior de la palanca de la doble palanca amb una de les seves dents (pla inclinat) per tornar a tensar, de manera que la PEÇA en repĂ²s del braç inferior de la palanca allibera la roda saltadora (treball d'alliberament). Impulsat pel tren d'aterratge, aquest ara es torça molt rĂ pidament i retensa la molla principal torçant el corrĂ³ espiral (l'extrem de l'espiral interior). La molla motriu no proporciona un parell constant a la roda d'escapament, ja que es relaxa una i altra vegada entre operacions de retensiĂ³ (caracterĂstica de molla). En el diagrama, el parell tindria, per tant, una corba semblant a una dent de serra.
La relaciĂ³ d'engranatges DE la segona roda (no mostrada), que gira un cop per minut, fins a la roda motriu Ă©s d'1:10. Com que el volant es mou en sis passos (6 dents) per revoluciĂ³, la segona roda realitza 60 passos per minut. AixĂ² s'anomena "segon saltador" perquè la segona mĂ asseguda a l'eix de la segona roda es mou una vegada per segon. Aquesta pantalla Ă©s estĂ ndard en els rellotges de quars actuals, perĂ² nomĂ©s era possible amb rellotges petits mecĂ nics (rellotges de butxaca, rellotges de polsera) mitjançant l'Ăºs d'un Remontoir intermedi. Normalment, la seva segona mĂ es mou amb la cadència de la roda d'escapament, de manera que la segona mĂ avança en diversos passos per segon (normalment cinc).
Pel que se sap, les construccions modernes d'emmagatzematge intermedi per a rellotges petits (rellotges de polsera) utilitzen F. A. Llarga una molla de pèl com a font principal. No obstant aixĂ², s'utilitzen diferents mecanismes de commutaciĂ³. EsquemĂ ticament, un exemple recent es mostra a la imatge adjacent[6][7] (per a mĂ©s informaciĂ³ vegeu [8][9][10]).
 remontoir intermedi (principi aplicat en els Ăºltims temps)
remontoir intermedi (principi aplicat en els Ăºltims temps)
Els eixos 1 a 5 es munten en un marc que no es mostra. El corrĂ³ espiral SR i la roda motriu AR estan fermament connectats a l'eix 2 i, per tant, circumferencials junts. Una anomenada GD de gruix uniforme (lleva Reuleaux) s'assenta fermament a la roda d'escapament de HR. Tots dos giren lliurement sobre l'eix 2 com un eix buit. El gruix d'equilibri s'executa a la forquilla d'una palanca d'engranatges SH, que pot girar al voltant de l'eix 1.
S'utilitza un gruix uniforme perquè es comporta com un cilindre muntat excèntricament (Ă©s a dir, mou la forquilla endavant i enrere sense canviar el joc) quan es revoluciona, perĂ² no tĂ© un centre de gravetat excèntric. En el cas dels rellotges portĂ tils, aixĂ² comportaria que s'exerceixi un parell motor indesitjable sobre la roda d'escapament en diferents posicions.
La palanca d'engranatges porta dos palets de PA, que, quan es mou la palanca, s'enganxen alternativament amb la roda del desviador SRA, que tĂ© una dent de desviador SZ. La roda del desviador estĂ constantment sotmesa a un parell motor en sentit contrari a les agulles del rellotge a travĂ©s de la roda motriu LW impulsada per l'acumulador principal d'energia (molla principal). La roda del desviador no es pot torçar sempre que la dent del desviador descansi contra un dels dos palets de la palanca d'engranatges. L'AS (molla espiral) estĂ connectada a la politja espiral en el seu extrem interior i a un bloc espiral SK unit a la roda d'escapament en el seu extrem exterior. No hi ha mĂ©s connexiĂ³ entre la roda motriu i la roda d'escapament. La molla principal estĂ proveĂ¯da d'una precĂ rrega entre la roda motriu i la roda d'escapament (girant les rodes les unes contra les altres), que acciona la roda d'escapament i Ă©s suficient per proporcionar al sistema oscil·lant equilibri-espiral un impuls motriu que mantĂ© la vibraciĂ³ a travĂ©s de l'armadura.
La roda d'escapament, impulsada per la molla principal i inhibida periĂ²dicament per l'armadura A, s'escapa gradualment. En el procĂ©s, la força motriu es relaxa. Durant aquest procĂ©s, la molla principal tambĂ© ha d'aplicar el treball d'alliberament. AixĂ² consisteix en el fet que la forquilla s'ha de moure contra la resistència a la fricciĂ³ entre la dent canviant i el palet. A diferència d'altres mecanismes d'alliberament, el treball que s'ha d'aplicar contĂnuament Ă©s un avantatge, ja que no hi ha caiguda de parell quan es dispara. DesprĂ©s que la roda d'escapament hagi girat 180°, un palet allibera la dent del desviador, mentre que l'altre ja s'ha mogut a la posiciĂ³ d'encaix de la dent del desviador. La roda del desviador, impulsada pel tren d'aterratge, ara es mou 180° fins que la dent del desviador impacta contra el palet. La molla motriu tambĂ© es retensa 180°. Com ja ha descrit Lange, la unitat pas a pas s'utilitza per mostrar el "segon saltant".
Una animaciĂ³ es pot trobar a [11].
La molla motriu no proporciona un parell constant a la roda d'escapament, ja que es relaxa una i altra vegada entre operacions de retensiĂ³ (caracterĂstica de molla). En el diagrama, el parell tindria, per tant, una corba semblant a una dent de serra. Per tant, com va fer Harrison, s'utilitzen diversos mecanismes per eliminar aquest desavantatge. El que tots tenen en comĂº Ă©s que la força decreixent de la molla Ă©s contrarestada per un braç de palanca eficaç que s'amplia. El parell que actua sobre la roda d'escapament com a producte de la força i el braç de palanca roman en gran mesura constant.
La imatge de la dreta explica aquesta construcciĂ³, adequada per retensar angles < 90 ° (aquĂ 45 °).
 CompensaciĂ³ de la caiguda de potència de la molla principal en un rellotge de polsera (principi)
CompensaciĂ³ de la caiguda de potència de la molla principal en un rellotge de polsera (principi)
Un anell de subjecciĂ³ SR estĂ fermament connectat a la roda motriu AR i a un excèntric EX. Depenent de la roda del desviador no mostrada, la roda motriu i l'anell de subjecciĂ³ es mouen gradualment impulsats pel tren d'aterratge. L'extrem exterior de l'espiral de la unitat AS estĂ unit a l'anell de subjecciĂ³ amb una agulla. L'anell de subjecciĂ³ pot girar lliurement sobre l'eix 1 com un eix buit. La roda d'escapament HR estĂ connectada permanentment a l'eix 1 i un suport per a passadors SH per al passador de transmissiĂ³ TS. El portapins estĂ dissenyat per un contrapès de manera que el seu centre de gravetat coincideixi amb l'eix de l'eix i, per tant, no es produeixen parells no desitjats quan canvia la posiciĂ³ del rellotge. L'extrem interior de la molla principal estĂ unit a un corrĂ³ espiral SR, que pot girar lliurement sobre l'eix 1. El passador d'accionament AST estĂ unit al corrĂ³ espiral. La Palanqueta de compensaciĂ³ de força KA estĂ equipada amb dos braços, les superfĂcies de contacte del passador formen un pla en què es troba l'eix excèntric.
El ressort d'accionament pretesat entre l'anell de subjecciĂ³ i la politja espiral exerceix un parell motriu (quan l'anell de subjecciĂ³ estĂ en repĂ²s) a travĂ©s del corrĂ³ espiral i el passador d'accionament de la Palanqueta de compensaciĂ³ de força. Per tant, no hi ha acciĂ³ directa de la molla principal a la roda d'escapament. NomĂ©s la Palanqueta d'equilibri de força actua amb el mateix parell al passador de transmissiĂ³ TS i, per tant, a la roda d'escapament. La molla principal tensada proporciona el parell motor F1∙a (fase 1). La roda d'escapament, inhibida intermitentment per l'escapament i impulsada pel parell motriu, ara funciona gradualment, amb la força de la molla motriu disminuint contĂnuament (la roda de tensiĂ³ estĂ aturada). Amb la roda d'escapament, el disc de compensaciĂ³ de força tambĂ© gira gradualment, perĂ² al voltant de l'eix excèntric. AixĂ² augmenta la mida del braç de palanca efectiu (mostrat en la fase 2 desprĂ©s del moviment de la roda d'escapament en 45°; b>a; F2
A mĂ©s del major esforç requerit per a la compensaciĂ³ de força, el desavantatge d'aquest disseny Ă©s que els pins dels braços del disc de compensaciĂ³ de força es mouen constantment en relaciĂ³ amb ell (fricciĂ³).
Com ja s'ha esmentat al principi, en el cas dels rellotges wearables, Ă©s com a mĂnim qĂ¼estionable si es pot aconseguir un millor resultat de cronometratge mitjançant l'Ăºs d'un Remontoir intermedi.
| Iohannes Tinctoris - Jerusalem |
| El CNI i el -no tan secret- codi del Gran CapitĂ |
| Adeste fideles |
| Fernando J. CorbatĂ³ |
| Capitulacions de Santa Fe - TranscripciĂ³ |
| Calavera catalana - Barca |
| La volta al mĂ³n s'organitzĂ a Barcelona |
| Humorista - Mn Gralla lo meu cony no menja palla |
| Las cuatro cartas de Fernando Colom a su hermano Diego Colom de la Catedral de Santo Domingo |
| Companyia d'Osona |

Afegeix-hi un comentari: